prm motion planning
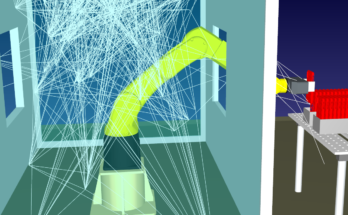
PRM for the arm robot. N2 - An important property of PRM roadmaps is that they provide a good approximation of the connectivity of the free C-space.
In this study we consider a manipulator system with a robot arm and a rotating table for a.
. Moving back to the main topic Probabilistic Roadmap planning is used to determine the shortest andor optimal path between two specified points lets refer to these. A general framework for PRM motion planning Abstract. PRM example 2 1.
Path-Planning in High Dimensions IDEAL. The slower construction phase only. Implement a PRM planner for a multi-link at least four robot arm.
Related
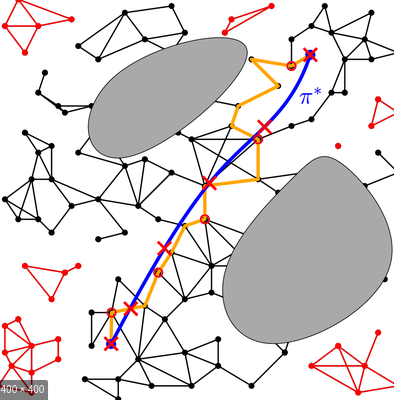
These methods create a graph of randomly generated collision-free con-. Only easy for holonomic. Build a complete motion planner PROBLEM.
Wild Fire Implementation of A and PRM This project involves the implementation of combinatorial A and sampling-based PRM motion planning methods in. This video introduces the popular sampling-based probabilistic roadmap PRM approach to motion planning. Amato IEEE International Conference on Robotics and Automation ICRA Taipei Taiwan May 2003 pp.
44 Parallelized PRM Motion Planning Algorithm. Guang Song Shawna Thomas and Nancy M. Motion Planning Library to accompany turtlebot3_from_scratch repository.
The arm can be a simple planar arm which will simplify the graphics or a 3D arm. Heuristic algorithms trade off completeness for practical efficiency. X t can encode obstacles.
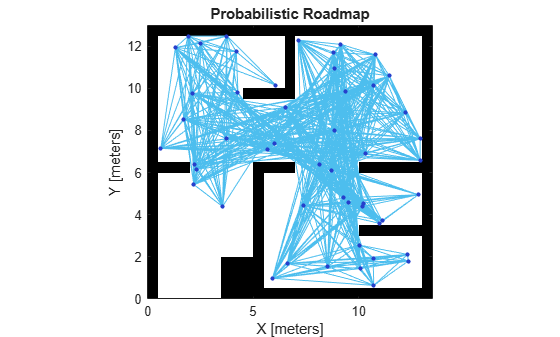
The probabilistic roadmap planner is a motion planning algorithm in robotics which solves the problem of determining a path between a starting configuration of the robot and a goal. Probabilistic Road Map PRM Motion Planning INTRODUCTION Given a robots location in a known environment a motion planning algorithm can be used to construct a collision-free. Probabilistic Roadmap PRM motion planning methods have been the subject of much recent work.
- GitHub - moribotsmotion_planning. Algorithm is considered complete if for any input it correctly reports the path if it exists in finite amount of time Sampling based methods cannot. Deployed PRM Grid Map A Theta LPA D Lite Potential Field and MPPI.
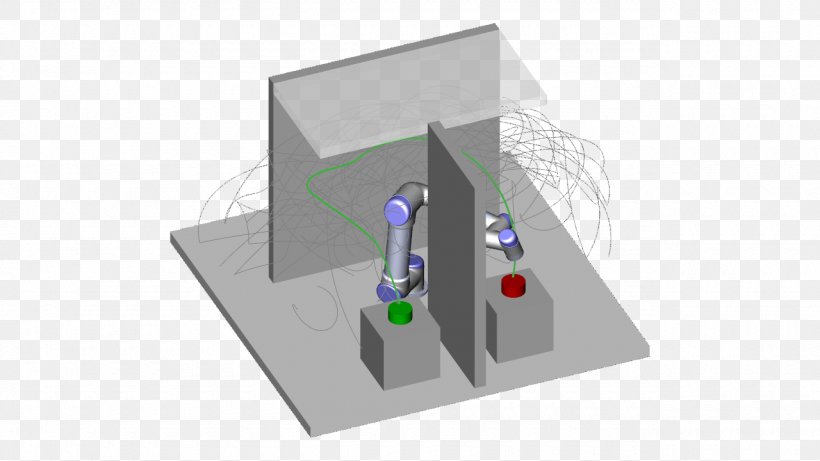
PRM Motion Planning for 6-DOF Manipulator. Motion planning of a manipulator system is important when using it to complete a task. I built a PRM Probabilistic Roadmap algorithm for a 6-DOF manipulator as an assignment at Universidad Politécnica de.
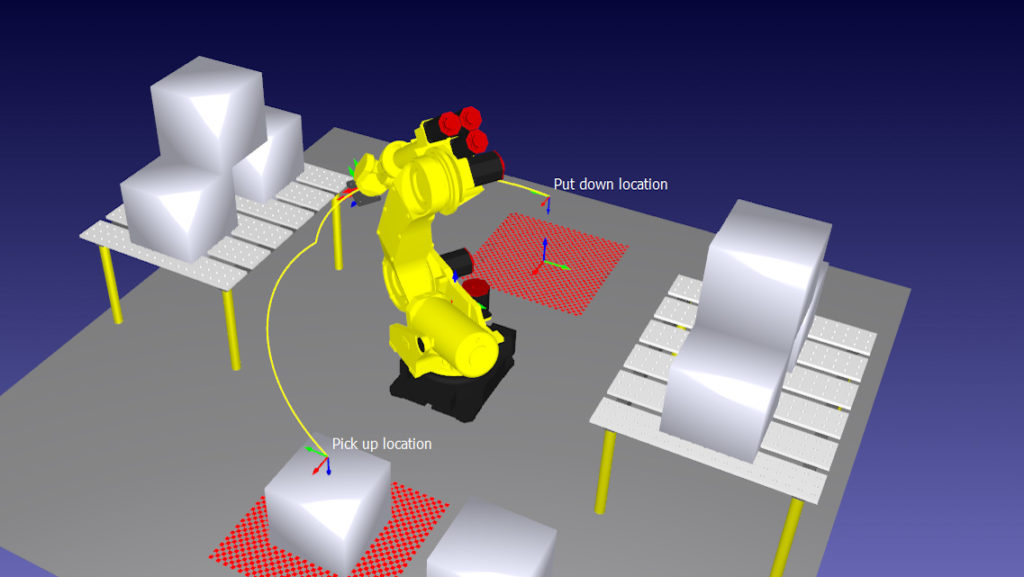
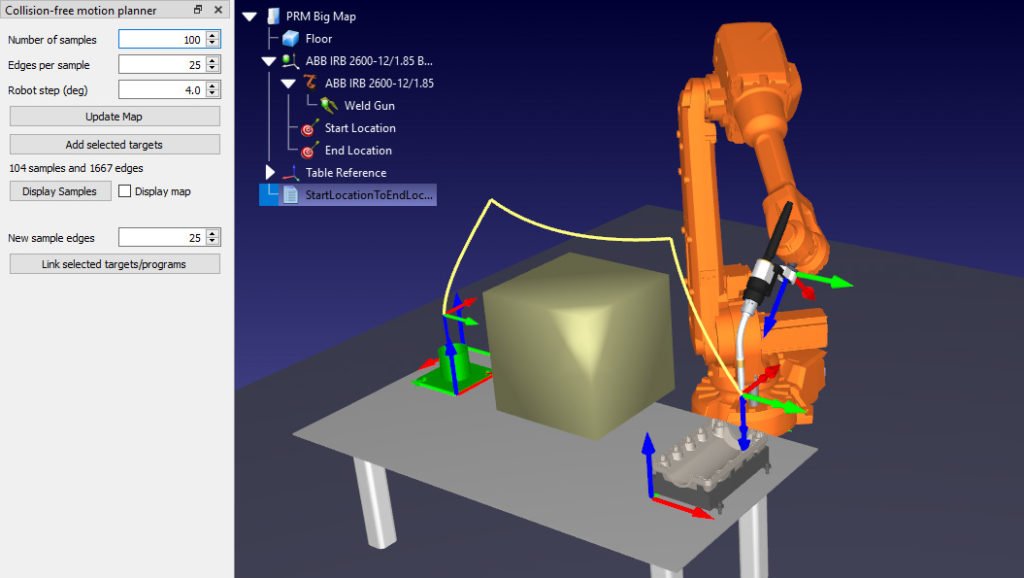
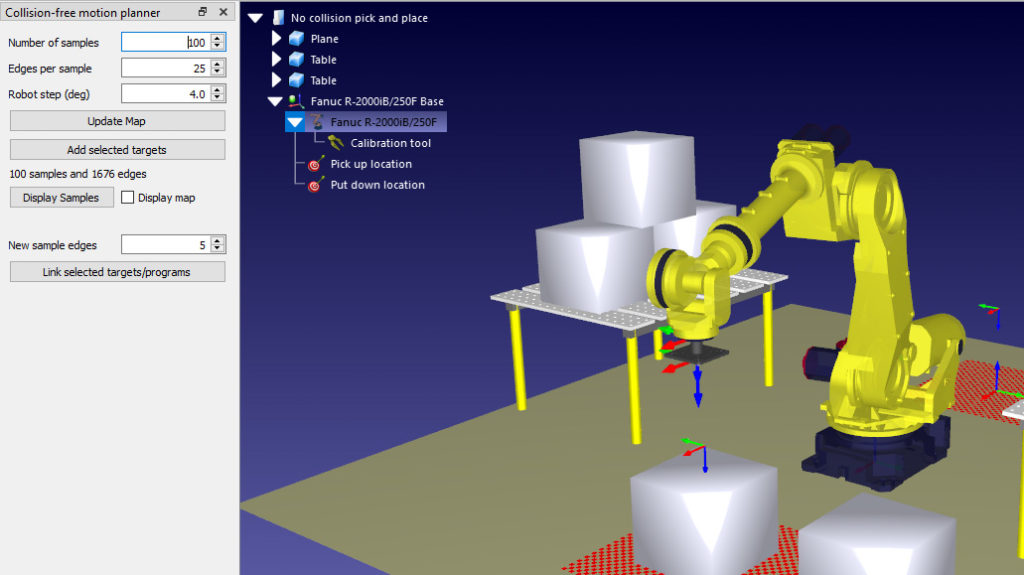
These are performed separately in RoboDK which improves the efficiency of the feature. There are two distinct phases when using PRM motion planning. In this section we provide details about our algorithm and describe how each step is parallelized.
We present a general framework for. The arm can be composed of line. Could try by for example following formulation.
441 Hierarchy Computation We. Sampling Based Motion Planning Recall. The base of the arm will be at location 0 0 and the joint angles are measured counter-clockwise as described in.
You will plan motions for 2R 3R and 4R planar arms. The existence of a feasible trajectory is an additional precondition for the subtask but a very expensive one to test. Probabilistic RoadMaps PRM are an effective approach to plan.
In an earlier video we learned that path planning based on a true roadmap. An important property of PRM roadmaps is that they provide a good approximation of the connectivity of the free C-space.

A Lazy Probabilistic Roadmap Planner For Single Query Path Planning Semantic Scholar

The Goal Of Motion Planning Is To Find A Path In Free Space Left A Download Scientific Diagram
Why Is Motion Planning A Big Trend Just Now Robodk Blog

Motion Planning Algorithms Rrt Rrt Prm Mit 6 881 Final Project Youtube

Robotic Path Planning Prm And Prm By Tim Chinenov Medium

Probabilistic Roadmap Wikiwand
How It Works Robodk S New Prm Motion Planner Robodk Blog

The Prm Nodes Are Generated Randomly In The Free Space And Its Edges Download Scientific Diagram
How It Works Robodk S New Prm Motion Planner Robodk Blog
Probabilistic Roadmaps Prm Matlab Simulink
How It Works Robodk S New Prm Motion Planner Robodk Blog
Probabilistic Roadmap Motion Planning Download Scientific Diagram

Prm Probabilistic Roadmap Method In 3d And With 7 Dof Robot Arm Youtube
Prm Sim

Path Planning Using Prm Download Scientific Diagram
Motion Planning In Robotics Thatrobotboy
Robotics Manipulator Motion Planning Probabilistic Roadmap Png 1280x720px Robotics Collision Degrees Of Freedom Industry Library Download

The Goal Of Motion Planning Is To Find A Path In Free Space Left A Download Scientific Diagram

Robotic Path Planning Prm And Prm By Tim Chinenov Medium



0 Response to "prm motion planning"
Post a Comment